CS231n笔记 Lec4 神经网络
1.神经网络模型
-
生物神经网络中树突(dendrite)作为输入与其他神经元的轴突相连,而轴突作为神经元的输出,人工神经网络有借鉴这个模型。神经网络有输入层、隐层和输出层。
-
人工神经网络仅仅是生物神经网络的一个粗糙模型,比如生物神经网络会有多种类型的神经元,并且每个有着不同属性,树突进行复杂的非线性运算,突触是一个非线性动态系统,并且在精确的时间输出脉冲在许多系统中是重要的,这些在人工神经网络中只进行了简单的建模或者未建模。
-
单个神经元本质上是一个线性分类器(然后通过激活函数来加入非线性因素)。
-
其层数计算不算输入层,比如单层神经网络描述的是一个没有隐层的神经网络。
-
输出层通常不作用激活函数,因为输出层被用来计算分类得分,可以是任意实数。
-
计算神经网络训练的参数个数:
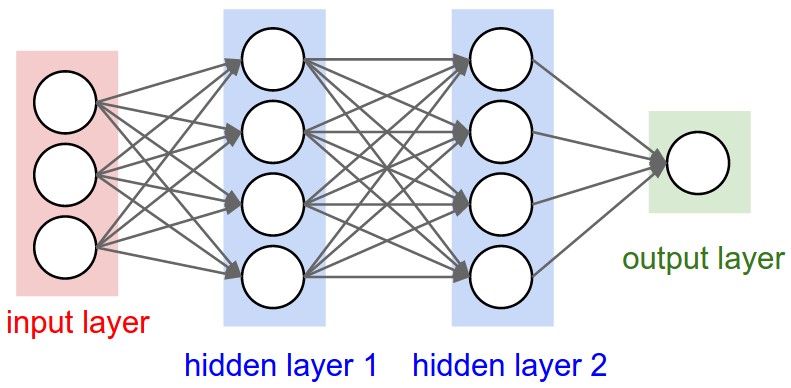
该神经网络有4+4+1个神经元,权重参数有[3×4] + [4×4] + [4×1] = 32个,加上bias参数4+4+1个,共41个训练参数。
-
单隐层神经网络可以逼近任意连续函数(intuitive explanation),尽管该点在数学上可以证明,但是在实践中是一个相对薄弱或者说无用的条件。相关阅读:
1)Deep Learning book in press by Bengio, Goodfellow, Courville, in particular Chapter 6.4.
2.常见激活函数
-
sigmoid函数:由于1)[严重]当激活函数输出值为0或者1时,会导致梯度消失(Gradient Vanishing),实际上也可以发现sigmoid函数一阶导数的最大值为1/4,所以每经过一次激活函数梯度变为原来的1/4。2)sigmoid函数不是以0为中心的。由于输入数据为正数,sigmoid函数的值也为正数,所以梯度值要么都为正数要么都为负数,这将会导致优化路径为Z字型,效率低,不过这个问题可以通过累加一批次数据的梯度来缓和。
-
tanh函数:这个函数同样存在梯度消失问题,实际上tanh函数是一个经过线性变换的sigmoid函数,存在关系$tanh(x) = 2\sigma(2x) - 1$ 。
-
ReLU(Rectified Linear Unit): $\max(0, x)$ ,这个函数近年来常用,有一些支持和反对意见。
1) + 比起sigmoid和tanh,它被发现有利于加速SGD的收敛,论点是由于该函数是线性的且不饱和(non-saturating)。
2) + 比sigmoid和tanh,ReLU计算开销更小。
3) - ReLU unit在训练过程中容易停滞(Dying ReLU),因为当一个较大梯度值通过ReLU神经元导致权重更新后,这个ReLU神经元将很难再被激活。这个问题可以通过调整学习率来缓和。
-
Leaky ReLU:$f(x) = \mathbb{I} (x < 0)(\alpha x) + \mathbb{I} (x < 0)(x)$,这么设计的原因主要是为了解决Dying ReLU问题,不过这个函数并没有绝对改善。
-
Maxout: $\max (w_1^Tx + b_1, w_2^Tx + b_2)$,可以解决Dying ReLU和 saturating问题,但是由于要对每个神经元需要训练两组参数,使得参数数量增多。
实践指导:实践中同一个神经网络中混合多种神经元十分罕见,尽管这么做没有根本性问题,通常我们使用ReLU函数,如果在意Dying ReLU问题,尝试Leaky ReLU或者Maxout,永远不要使用sigmoid。
3.如何设置神经网络的层数以及每层神经元的个数
- 神经网络的层数和每层神经元的个数越多,神经网络的表示能力越强,但是同时会带来过拟合的问题,实践中并不鼓励为了缓解过拟合问题而降低神经网络的规模,而是通过一些手段(L2 Regularization、Dropout等)来缓和。
- 神经网络规模越小越难被训练,因为其容易陷入不好的局部最小值。
4.数据预处理
-
PCA
-
协方差矩阵: $\Sigma = E\big[(\textbf X - E[\textbf X])(\textbf X - E[\textbf X])^T\big]$,其中矩阵的第(i, j)个元素是$X_i$与$X_j$的协方差,$\Sigma$的对角线是方差。$\Sigma$是对称的和半正定positive semi-definite的。计算方式:
1 2
X -= np.mean(X, axis=0) cov = np.dot(X.T, X) / X.shape[0]
-
SVD分解:假设$M$是一个m×n阶的矩阵,其元素属于实数域或者复数域,若存在分解
\[M = U\Sigma V^*\]其中$U$是m×m阶的酉矩阵,$\Sigma$是m×n阶非负实数对角矩阵,$V^$ ($V$的共轭转置)为n×n的酉矩阵 ($VV^=\mathbb I_n$),则称这样的分解为奇异值分解。其中$\Sigma$的对角线元素为$M$的奇异值。
1 2
U,S,V = np.linalg.svd(cov) Xrot = np.dot(X, U)
其中U的每一列是特征向量,S是一维向量奇异值。
将X与U的若干列做点积就是PCA。
-
-
Whitening(白化):
1
Xwhite = Xrot / np.sqrt(S + 1e-5)
该方法会放大噪声,实践中可以增大1e-5来减少噪声影响。
卷积神经网络中PCA/Whitening都不使用,使用mean和normalization。
-
权重不能都初始化为0,因为如果权重都初始化为同一个数,则他们更新时计算的梯度也是一样的,从而导致训练后的参数都相同。通常采用随机初始化。
-
初始化后的w除以输入数据个数的平方根有利于收敛。
-
$Var(XY) = [E(X)]^2Var(Y) + [E(Y)]^2Var(X) + Var(X)Var(Y)$
-
biases通常初始化为0
-
实践中若采用ReLU激活函数,通常使用w=np.random.randn(n)*sqrt(2.0/n)进行初始化。
-
神经网络使用Batch Normalization是常见的事
5.正则化
-
L2正则化:使得w不会太大
-
L1正则化:使得w尽可能接近0
-
Max norm constraints: 限定w长度的最大值,即$ w _2 \lt c$ -
Dropout:训练过程中以概率p删除神经元节点,在预测过程中需要对采用dropout的隐层结果乘以p(Inverted dropout不需要,推荐使用)。
Dropout: A Simple Way to Prevent Neural Networks from Overfitting
- In practice: It is most common to use a single, global L2 regularization strength that is cross-validated. It is also common to combine this with dropout applied after all layers. The value of p=0.5p=0.5 is a reasonable default, but this can be tuned on validation data.
6.损失函数
- hinge loss、softmax loss
- 当类别很多时,可以采用Hierarchical Softmax
- 如果有可能,尽可能把回归问题转换成分类问题(离散化),因为L2 loss比softmax更难优化且一个离群点会引入更大的梯度。如果不得已使用回归,则使用dropout不是一个好主意,尤其是在L2 loss前一层使用。
7.Learning
-
Gradient checks:
$\frac{df(x)}{dx} = \frac{f(x+h) - f(x)}{h} \tag 1$
$\frac{df(x)}{dx} = \frac{f(x+h) - f(x-h)}{2h} \tag 2$
通常使用(2)做Gradient checks,因为(2)更精确。通过泰勒展开可以知道(2)的误差为$O(h^2)$的高阶无穷小,而(1)的误差为$O(h)$的高阶无穷小。$h$通常设为1e-4 ~ 1e-6。仅对每个参数检查少量维数的梯度。
等到发现loss确实是下降的再做梯度检查!
为了防止梯度检查中data loss 被 regularization loss掩盖,先不加入regularization loss 进行Gradient checks,然后再将其加入进行Gradient checks。同时,在Gradient checks时不使用Dropout和Data augmentation
?: Therefore, a better solution might be to force a particular random seed before evaluating both f(x+h) and f(x−h), and when evaluating the analytic gradient.
-
使用相对差来比较数值梯度与解析梯度,即$$\frac{ f_a’ - f_n’ }{\max( f_a’ , f_n’ )}$$,因为当$f_n’$和$f_a’$很小的时候使用分子来比较不合理。 -
relative error > 1e-2 usually means the gradient is probably wrong
-
1e-2 > relative error > 1e-4 should make you feel uncomfortable
-
1e-4 > relative error is usually okay for objectives with kinks. But if there are no kinks (e.g. use of tanh nonlinearities and softmax), then 1e-4 is too high.
-
1e-7 and less you should be happy.
-
但是需要注意,神经网络越深,相对差越大,例如对于一个10层的神经网络,1e-2的相对差是可以接受的。
-
计算相对差的时候使用double类型的浮点数,float类型会使得相对差变大。
What Every Computer Scientist Should Know About Floating-Point Arithmetic
在梯度检查的时候我们中途打印梯度更有利于检查。
-
-
Sanity Check
- 检查初始的loss是否正确,先不加正则化项,正确后再加入正则化项检测。
- 在小数据集上训练,将其data loss训练到接近0(overfit)。这样能保证一般情况下正确,比如在特征是随机的情况下尽管overfit但是并不正确。
-
监视训练过程
-
作图时,使用epoch(每个样例都被访问过一次为一个epoch)作为横坐标比iterations好,因为iterations取决于batch size的大小。
-
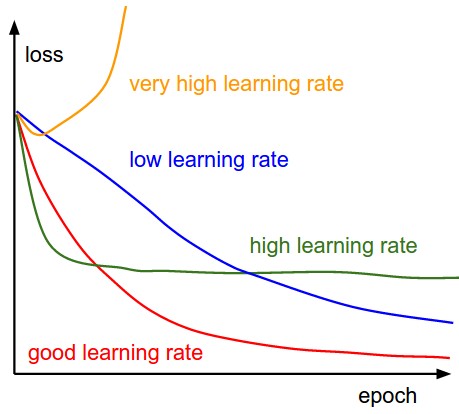
学习率:
-
batch size 太小会使得loss曲线震荡下降
-
训练集精度与验证集精度:
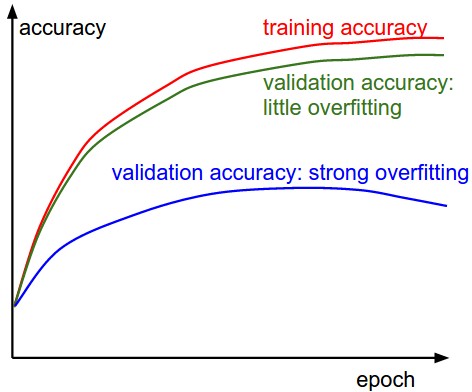
绿色曲线说明模型容量小,可以增加神经网络参数来调整。
-
Ratio of weights: 参数更新量的值(np.linalg.norm(-learning_rate*dW))和参数本身(np.linalg.norm(W.ravel()))的比,这个值通常在1e-3左右。大于1e-3说明学习率大了,否则学习率小了。
-
检测不好的初始化:统计激活值与梯度的直方图,观察它们的分布。
-
可视化第一层特征,如果是光滑、清晰的说明很好
-
-
参数更新
-
momentum(相当于物体运动过程中的动摩擦因素?):
1 2
v = mu*v - learning_rate*dx x += v
-
Nesterov Momentum(没看明白(2)的写法):
(1):
1 2 3
x_ahead = x + mu * v v = mu * v - learning_rate * dx_ahead x += v
(2):
1 2 3
v_prev = v v = mu * v - learning_rate * dx x += -mu * v_prev + (1 + mu) * v
推荐阅读:
- Advances in optimizing Recurrent Networks by Yoshua Bengio, Section 3.5.
- Ilya Sutskever’s thesis (pdf) contains a longer exposition of the topic in section 7.2
-
Annealing the learning rate(有三种方式):
- step decay: 随着epoch增加,减小学习率。实践中可以查看验证集精度,如果验证集精度不再提高,可以适当降低学习率。
- Exponential decay: $\alpha = \alpha_0e^{-kt}$,其中$\alpha_0, k$是超参数,t是迭代次数或者轮数。
- 1/t dacay: $\alpha = \alpha_0 /(1 + kt)$,其中$\alpha_0, k$是超参数,t是迭代次数或者轮数。
实践中采用step decay多一点,因为k这个参数不太好解释。
-
其他优化方法:
- 牛顿法: $x \leftarrow x - [Hf(x)]^{-1}\nabla f(x)$ ,其中$Hf(x)$是Hessian 矩阵(一个二阶偏导数矩阵),该方法由于没有学习率等超参数,因此得到一些人的支持。不过这个方法在深度学习中是无法使用的,因为深度学习的参数通常有百万个,计算Hessian矩阵的时间和空间开销都非常大。因此,有人提出了求Hessian矩阵逆的估计值,其中最好的是L-BFGS ,这样尽管Hessian矩阵求出来了(存储问题解决了),但是原始的L-BFGS必须在整个训练集上计算,而训练集通常很大。
实践中不常用L-BFGS,通常采用SGD+Nesterov Momentum.
推荐阅读:
- Large Scale Distributed Deep Networks is a paper from the Google Brain team, comparing L-BFGS and SGD variants in large-scale distributed optimization.
- SFO algorithm strives to combine the advantages of SGD with advantages of L-BFGS.
-
对每个参数设置自适应的学习率:
Adagrad、RMSprop、 Adam(常用)
Unit Tests for Stochastic Optimization proposes a series of tests as a standardized benchmark for stochastic optimization
-
超参数优化
贝叶斯超参数优化:Hyperparameter search, Bayesian optimization and related topics
-
8.评估
-
模型集成
- 同样的模型,不同的初始化
- 在交叉验证中发现的最好的几个模型
- 单个模型的不同检测点(???)
- 在训练过程中,取最后几个epoch得到的权重取平均
相关阅读: “Dark Knowledge”
推荐阅读:
- SGD tips and tricks from Leon Bottou
- Efficient BackProp (pdf) from Yann LeCun
- Practical Recommendations for Gradient-Based Training of Deep Architectures from Yoshua Bengio